This Hal interface module provides the ability to connect HAL pins to NML commands. It should provide similar hardware button connections to those functions in emc's graphical interfaces. Please edit this page so that it represents your understanding of hardware based human machine interfaces.
Next, start emc2 and halui will be run in the background automagically. All you need to do next is connect the various pins (check the section about naming of the pins) to your actual buttons & leds. You can always emulate hardware buttons by using HalVCP? (as described in the next section).
Taken from the sample configuration halui_halvcp. If you run that configuration you will get an HalVCP? panel (emulates HAL pins using GTK widgets) like this:
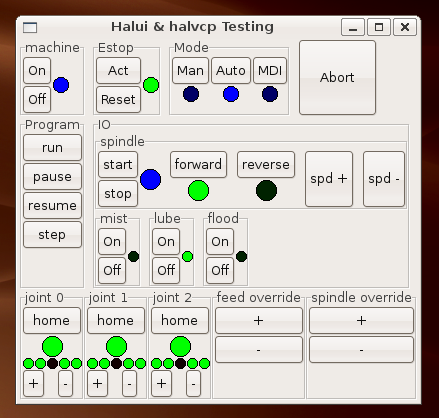
You can see most of the buttons you can have on a real panel. By looking at the sample configuration, one can easily adapt that to a hardware panel with real knobs & leds & switches.
Naming:
All pins will be named after the following scheme:
halui.name.<number>.action
name refers to the name of the component,
currently one of:
- machine
- estop
- mode
- mist
- flood
- lube
- jog
- program
- probe
...
<number> if more than one component of the same type exists
action usually on/off or is-on for the status (this uses the NIST way of control, each action is done by momentary pushbuttons, and thus more than one source of control is allowed: e.g. multiple UI's, GUI's )
Exported pins:
DONE: - machine:
halui.machine.on bit //pin for setting machine On halui.machine.off bit //pin for setting machine Off halui.machine.is-on bit //pin for machine is On/Off?
DONE: - estop:
halui.estop.activate bit //pin for setting Estop (emc internal) On halui.estop.reset bit //pin for resetting Estop (emc internal) Off halui.estop.is-reset bit //pin for displaying Estop state (emc internal) On/Off?
DONE: - mode:
halui.mode.manual bit //pin for requesting manual mode halui.mode.is-manual bit //pin for manual mode is on halui.mode.auto bit //pin for requesting auto mode halui.mode.is-auto bit //pin for auto mode is on halui.mode.mdi bit //pin for requesting mdi mode halui.mode.is-mdi bit //pin for mdi mode is on
DONE: - mist, flood, lube:
halui.mist.on bit //pin for starting mist halui.mist.off bit //pin for stoping mist halui.mist.is-on bit //pin for mist is on halui.flood.on bit //pin for starting flood halui.flood.off bit //pin for stoping flood halui.flood.is-on bit //pin for flood is on halui.lube.on bit //pin for starting lube halui.lube.off bit //pin for stoping lube halui.lube.is-on bit //pin for lube is on
DONE: - spindle:
halui.spindle.start bit halui.spindle.stop bit halui.spindle.forward bit halui.spindle.reverse bit halui.spindle.increase bit halui.spindle.decrease bit
halui.spindle.brake-on bit //pin for activating spindle-brake halui.spindle.brake-off bit //pin for deactivating spindle/brake halui.spindle.brake-is-on bit //status pin that tells us if brake is on
DONE: - joint:
halui.joint.0.home bit // pin for homing the specific joint halui.joint.0.is-homed bit // status pin telling that the joint is homed .. halui.joint.7.home bit halui.joint.7.is-homed bit
halui.joint.selected.home bit // pin for homing the selected joint halui.joint.selected.is-homed bit // status pin telling that the selected joint is homed
halui.joint.x.on-soft-min-limit bit
halui.joint.x.on-soft-max-limit bit
halui.joint.x.on-hard-min-limit bit
halui.joint.x.on-hard-max-limit bit
(x = 0..7, selected)
halui.joint.x.has-fault bit
(x = 0..7, selected)
halui.joint.select u8 // select joint (0..7) - internal halui halui.joint.selected u8 // selected joint (0..7) - internal halui halui.joint.x.select bit // pins for selecting a joint - internal halui halui.joint.x.is-selected bit // status pin - internal halui
DONE - jogging:
halui.jog.speed float //set jog speed
halui.jog.0.minus bit halui.jog.0.plus bit .. halui.jog.7.minus bit halui.jog.7.plus bit halui.jog.selected.minus bit halui.jog.selected.plus bit
DONE - tool:
halui.tool.number u16 //current selected tool halui.tool.length-offset float //current applied tool-length-offset
DONE: - program:
halui.program.is-idle bit halui.program.is-running bit halui.program.is-paused bit halui.program.run bit halui.program.resume bit halui.program.step bit halui.program.pause bit
DONE: - general:
halui.abort bit // pin to send an abort message (clears out most errors)
DONE: - feed-override
halui.feed-override.value float //current FO value halui.feed-override.scale float // pin for setting the scale on changing the FO halui.feed-override.counts s43 //counts from an encoder for example to change FO halui.feed-override.increase bit // pin for increasing the FO (+=scale) halui.feed-override.decrease bit // pin for decreasing the FO (-=scale)
DONE: - spindle-override
halui.spindle-override.value float //current SO value halui.spindle-override.scale float // pin for setting the scale on changing the SO halui.spindle-override.counts s43 //counts from an encoder for example to change SO halui.spindle-override.increase bit // pin for increasing the SO (+=scale) halui.spindle-override.decrease bit // pin for decreasing the SO (-=scale)
There is a lot of button and display handling logic written into each of the GUI systems. Writing one of these systems is not simply a matter of making a button and connnecting it to an NML message. For this reason we need to look at sample hardware human machine interfaces and compare their operation with what we are writing here.
JohnK? gave me an older AB control that I'll use for the first sample panel. Working left to right the buttons and pots are grouped like this. I'll put an (okay) by the stuff that is directly handled by the pins that have been identified in the source code above.
auto
MDI
Manual
Increment
Continuous
Handwheel
Home
These are manual mode operations. The incremental v continuous jog stuff is handled by different NML messages, at least as seen from the gui side of emcsh.
IMO we will want to keep this distinction. While the increment to be jogged is not defined system wide, we will probably need some way, perhaps something like hal blocks that assign distances to a set of pins or params so that changing the increment can be done by HAL pins.
Handwheel. For this we need the ability to select the target axis. I'm not convinced that handwheel communication/connection can be handled only within HAL. We need to clarify the effect on things like following error of a HAL geared handwheel. The alternative is a jog increment command for each handwheel pulse. How does trajectory planning and max accel and max vel come into play here?
This panel treats home as a mode rather than as a single per-axis button press. When home mode is active, pressing an axis button in the direction away from the home switch causes a jog away. Pressing it in the direction of the home switch causes a home switch search. Several variations of these button presses are possible. This can all be handled within CL. None of it is trivial.
+x
+y
+x
+4
traverse
-4
-x
-y
-z
Holding the traverse button causes jogs at rapid, otherwise the jog speed is dependent upon the selected speed of the next set of buttons. Once again this points to the need for float or int parameters that can be assigned to HAL pins for selection. CL can handle some of these variables but I'm not sure just how capable it is. (rayh need to do some testing)
Low 1x
Medium Low 10x
Medium 100x
Medium High 1000x
High 10000x
The names of these buttons are ambiguous at best. Is this units or encoder-counts/stepper-pulses? Whatever they are, they represents values for some variable. While handwheel is active they are the pulse multiplier variable. While incremental jog is active they are the possible increments.
F1
F2
F3
F4
F5
F6
F7
F8
The computer panel of the AB control had a full set of function keys so my assumption is that these represented other higher order functions than our ordinary keyboard keys. Perhaps they represent macros for things like manual tool change or pallet change, etc. AJ: maybe they can be user-assigned
Pot 50% to 120%
Buttons
ccw
cw
off
Spindle speed override isn't even an nml message yet much less a HAL ready float.
Pot 0% to 150%
Override Buttons
F1
25
50
100
Off (okay)
On (okay
Estop-Reset (okay)
Estop twist-to-release (okay & no, use iocontrol for ESTOP input)
Cycle Start
Single Block
Cycle Stop
Since the machine on function is really dependent upon the state of estop, we should be able to implement the estop reset from this panel using the on/off pin. The mushroom head twist-to-release will be external motor power
I'd like to consider making this panel work with EMC2. Most all of these buttons are illuminated and would show EMC status for those things that have an EMC status.
Quite a few of these can be handled inside the HAL or with CL and the pins identified. There are a few exceptions that will need to be added.
![[Home]](/chips.gif)