Vismach is a simulator to show 3D previews of a physical machine. The function an screenshots are presented below, for a tutorial, look at the bottom of the page.
Vismach.py is a python library to draw objects in a simulation window. It is located in /usr/share/pyshare (can't find it on git - was it removed?). The simultion itself is a script, based on vismach.py. The scripts are located in /usr/bin (Hal components). The .hal file of your machine in your /home/user/linuxcnc/config/yourmachine loads this script with "loadusr" al a HAL component and connects the axis. Following important things are described in the script:
At the moment, these simulations are available:
Example for object "ram":
ram = Translate([ram], 0,0,150)
table = Collection([
crotary, # relation to previous object Box(-150,-50, 81, 150, 50, 100), Box(-150,-40, 75, 150, 40, 81), ])



Note: You can navigate in the simulation window by moving your mouse and holding one button:
By the way - does anyone know how to scale these images in the wiki?
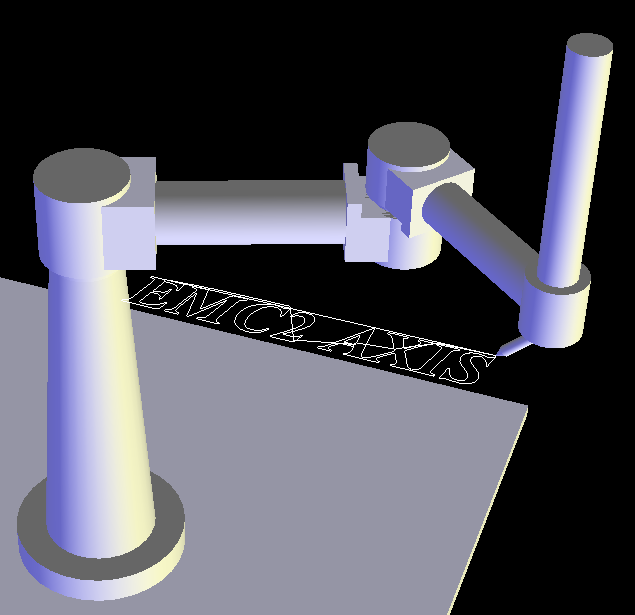
Vismach can be used to verify motions that don't show up in AXIS preview, such as custom kinematics or m-codes. This screenshot shows a "virtual rotary table" using the C-axis.
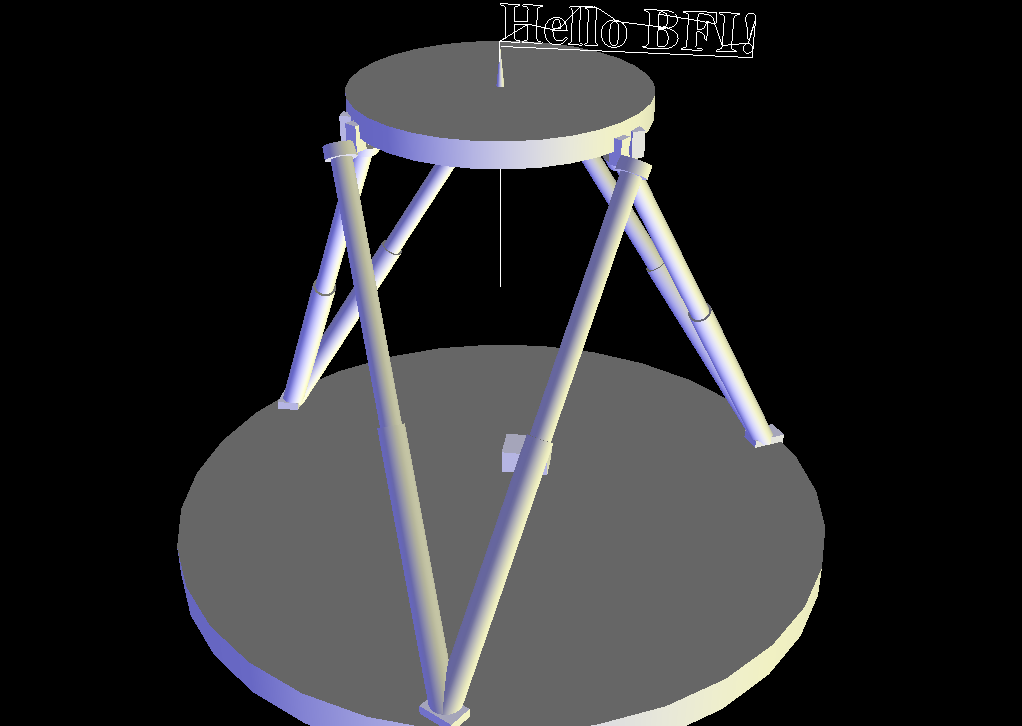
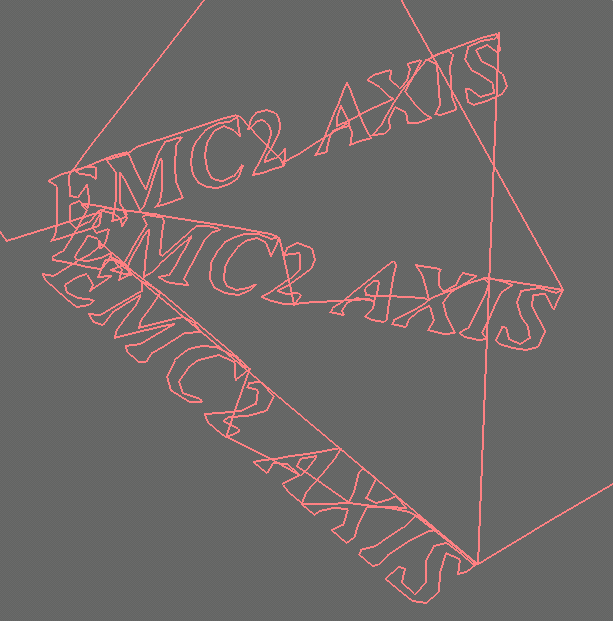 Another example on what one can do with LinuxCNC (ex Enhanced Machine Controller) and Vismach help.
Another example on what one can do with LinuxCNC (ex Enhanced Machine Controller) and Vismach help.

Setting up a Simulation is basically done in following steps. To get familiar how it is done, you should start below to see how the scripting an d debugging works.
The Simulator is loaded as Hal Component. Open a terminal and type:
$ halrunThen you will get the command interface for HAL. Type:
loadusr 5axisguiA Window with the 5 axis simulation should appear (it is not connectetd to a controller, so you can't do anything with it now, than view it). To test the connection with Hal you might try following commands:
halcmd: show pin halcmd: show param halcmd: show sigWhen you are ready you can unload the module again using and return to the normal shell:
halcmd: unloadusr 5axisgui halcmd: exitNow go to your /home/usr/linuxcnc/config/your_machine folder and edit the .hal file. Add at the bottom the line:
loadusr -W 5axisguiThe -W option tells Axis to wait for the simulator. Start AXIS your machine with configuration. This time the 5axisgui window will appear with it (again it is not connectetd to a controller, so you can't do anything with it now, than view it).
sudo su cp /usr/bin/5axisgui /usr/bin/my_machine_gui chmod +x /usr/bin/my_machine_guiThis will copy the 5axisgui script to a new file an makes it executable. Go to your /home/usr/linuxcnc/config/your_machine folder and edit the .hal file. Go to the bottom. Remove the line:
loadusr -W 5axisguiAdd the lines:
loadusr -W my_machine_gui net j0 axis.0.joint-pos-fb => my_machine_gui.joint0 net j1 axis.1.joint-pos-fb => my_machine_gui.joint1 net j2 axis.2.joint-pos-fb => my_machine_gui.joint2
This will load your script. Using the "net" command, it will connect the Feedback Signal of your machines joints 0,1 and 2 to the script 5axisgui for every joint. Save it and open Axis with your machine config - the window should pop up again. This time, you should be able to move something in the simulator, when controlling the machine with the key arrows. Of course - that's not your machine, and it might move anything. Close LinuxCNC.
sudo gedit /usr/bin/my_machine_guiThe following shows a script with the basics:
#!/usr/bin/python
#import needed python libs
from vismach import *
import hal
import math
import sys
#define HAL pins that can be connected in the .hal file of the machine
#to work propper, 7 pins have to be defined and connected to a geometry
#this file is for demonstration only
#enter the name of your file in the line below, where your_machine_gui stands; don't remove the " "
c = hal.component("your_machine_gui")
c.newpin("joint0", hal.HAL_FLOAT, hal.HAL_IN)
c.ready()
# geometry, placement, joints, colour
tooltip = Capture()
part = Collection([tooltip,Box(-100,-100,200, 100,100,900)])
part = HalRotate([part],c,"joint0",1,0,0,1)
work = Capture()
table = Collection([work,Box(-500,-500,-400, 500,500,-450)])
#model() and main() have a certain structure you always have to use
model = Collection([part, table])
main(model, tooltip, work, 1500)
You might copy it in your editor, save it and test it from the terminal with:
halrun loadusr my_machine_guiThere seem to be further issues I don't understand right now: Although this works from terminal using halcmnd, I can't load this script from AXIS without crashing. Seems to be some details which might be found out from vismach.py. It has nothing to do with the connection from Axis to the script made in the . hal file of your machine. Feel free to improve our knowledge and document it here :) The good thing is that it works with following script, where 7 joints are defined (seem to be always 7 in the other scripts - I just don't know why):
#!/usr/bin/python
#this file works for me and can be loaded with axis
#all pins are connected, the part ram ist connected to 3 degrees of freedom respectively to 4 joints as dummy
from vismach import *
import hal
import math
import sys
c = hal.component("5axisgui")
c.newpin("joint0", hal.HAL_FLOAT, hal.HAL_IN)
c.newpin("joint1", hal.HAL_FLOAT, hal.HAL_IN)
c.newpin("joint2", hal.HAL_FLOAT, hal.HAL_IN)
c.newpin("joint3", hal.HAL_FLOAT, hal.HAL_IN)
c.newpin("joint4", hal.HAL_FLOAT, hal.HAL_IN)
c.newpin("joint5", hal.HAL_FLOAT, hal.HAL_IN)
c.newpin("tool_length", hal.HAL_FLOAT, hal.HAL_IN)
c.ready()
tooltip = Capture()
tool = Collection([HalTranslate([tooltip], c, "tool_length", 0,0,-1)])
tool = Collection([tool, CylinderY(-100,75, -10,75)])
tool = HalRotate([tool],c,"joint4",1,0,-1,0)
wrist = Collection([tool, Box(-50,-100,0, 50,-25,100)])
wrist = HalRotate([wrist],c,"joint5",1,0,0,1)
ram = Collection([wrist,Box(-100,-100,200, 100,100,900)])
ram = HalTranslate([ram],c,"joint2",0,0,1)
ram = Collection([ram,Box(-100,100,350, 100,200,550)])
ram = HalTranslate([ram],c,"joint0",1,0,0)
ram = Collection([ram,Box(-800,200,350, 800,400,550)])
ram = HalTranslate([ram],c,"joint1",0,1,0)
ram = Collection([ram, Box(800,1000,-1000, 1000,-1000,-900)])
work = Capture()
table = Collection([work,Box(-500,-500,-400, 500,500,-450)])
model = Collection([ram, table])
main(model, tooltip, work, 1500)
Beeing this far, you might change the geometry in the script (use .stl or .obj import), the placement of the parts and the type of joint (translation/roatation and their direction/axis). You can connect tool parameters like the length to the simulation. Look into the other example simulations in /usr/bin and in the config files of the examples to see how it is done. The puma560gui is a good start point, because well commented and not to complexe.
Note that the AsciiOBJ class searches for the last # (which means comment) to start reading the file. Files generated with freecad don't include comment at the beginning, so you manually have to ad a #.
The functions are used this way:
part = AsciiOBJ(filename="path/to/OBJ_file.obj")
![[Home]](/chips.gif)