Vismach
Vismach is a simulator to show 3D previews of a physical machine. Vismach.py is a python library to draw objects in the simulation window. It is located in /usr/share/pyshare (can't find it on git - was it removed?). The simultion itself needs a script, which is based on vismach.py. The scripts are located in /usr/bin. The .hal file of your machine loads this script with "loadusr" and connects the axis. Following things are described in the script:
- geometry is defined or loaded from a .stl or .obj file
- joints are defined an and connected to a hal PIN
- colour is definded
At the moment, these simulations are available:
- 5axisgui
- hbmgui
- hexagui
- maho600gui
- max5gui
- puma560gui
- pumagui
- scaragui
Classes defined in vismach.py
Details about functions can be found from vismach.py itself and the already existing examples like 5axisgui or scaragui; a short summary follows:
Transform/place Objects:
- Translate()
- Scale()
- HalTranslate()
- HalRotate()
- Rotate()
- Track()
- CordsBase()
- Capture();
Example for object "ram":
ram = Translate([ram], 0,0,150)
Create Geometry
- TriangleXY()
- TriangleXZ()
- TriangleYZ()
- ArcX()
- Box()
- BoxCentred(x width,y width,z width); Box is centred on the origin
- BoxCentredXY(x width,y width,z width); Box is centred in x and y an is extruded from z = 0.
- CylinderX()
- CylinderY()
- CylinderZ()
- Sphere()
- AsciiSTL
- AsciiOBJ
- Collection(objects); sum up geometry objects for one axis of the machine. Example of Syntax:
table = Collection([
crotary, # relation to previous object
Box(-150,-50, 81, 150, 50, 100),
Box(-150,-40, 75, 150, 40, 81),
])
further classes
- Color(); apply colour for the specified part
- Hud(); head up display
- 0
The use of the classes can be seen in the scaragui script located in /usr/bin. For first experiments one might just have a look at 5axisgui, where geometry ist generated with simple boxes.
Set up your own Simulation
- Use a CAD and export .obj or .stl files for each axis consisting the geometry. The files can be produced using [FreeCAD]: Model the solid for each axis, create a mesh an [export] it as .obj or .stl.
- Create a *gui file for your machine in /usr/bin. Have a look at the existing scripts like scaragui.
- Read the geometry files with your script using the class AsciiOBJ or AsciiSTL. Define the axis (geometry, position, color, hal connection)
- Connect the script to your machine in .hal file with "loadusr" and the needed connections.
Screenshots

 '
'

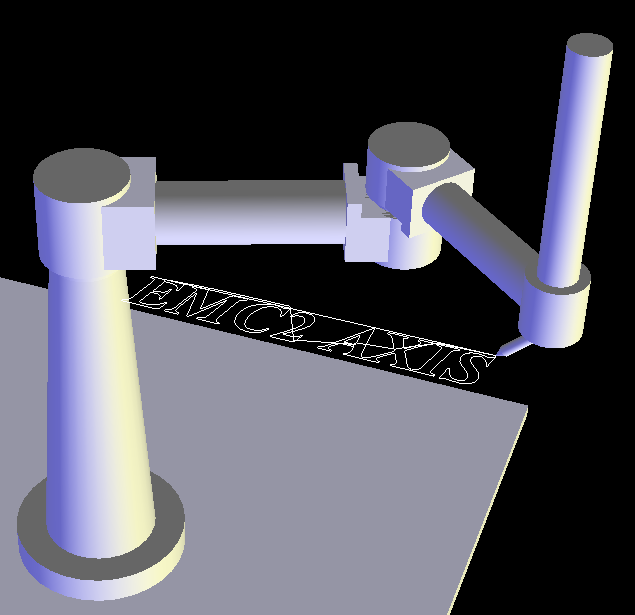
vismach can be used to verify motions that don't show up in AXIS preview, such as custom kinematics or m-codes
this screenshot shows a "virtual rotary table" using the C-axis
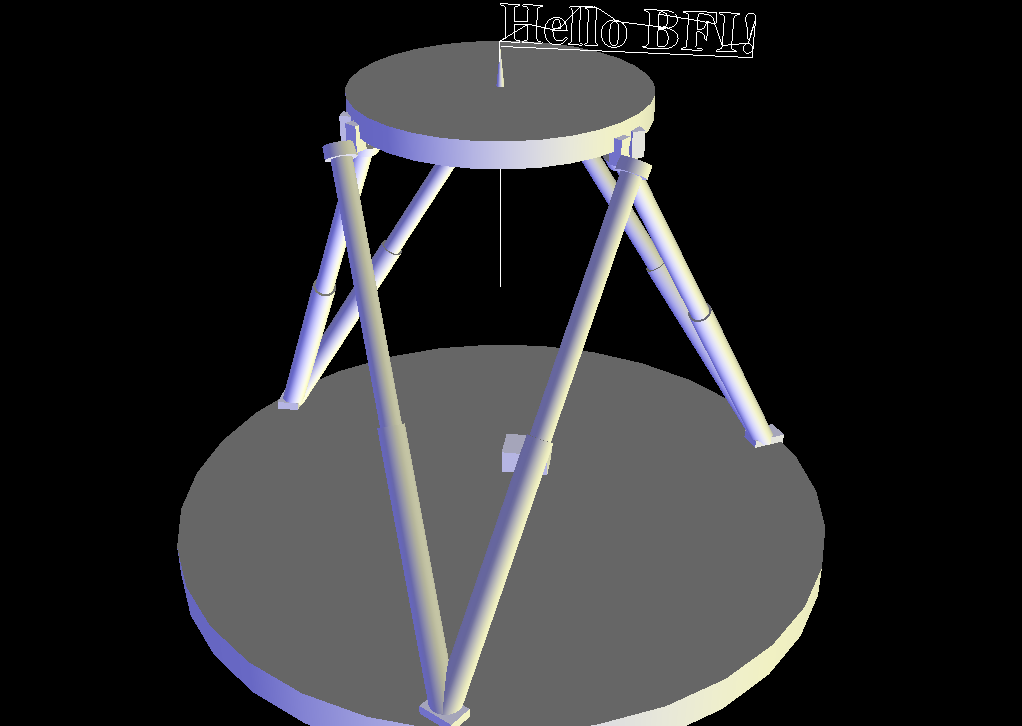
Another example on what one can do with LinuxCNC (ex Enhanced Machine Controller) and Vismach help.

![[Home]](/chips.gif)